星空体育平台官网入口 第十七届智能车智能视觉与平衡信标组新增规则
上周五(2022/3/18)在官方账号发布“ ”推文后,组委会陆续收到参赛学生、老师、竞赛合作伙伴的反馈。主要认为,扩大的规则虽然为参赛队伍提供了更大的解决问题的空间,但也造成了更多的焦虑,相应的技术训练和验证显得不足。经充分了解各参赛队伍的反馈意见,并与相关组别主办方技术人员讨论后,大赛秘书处决定不再扩大本次比赛“平衡灯塔组”和“智能视觉组”的规则,维持原计划保持不变。
本文对智能视觉组和平衡信标组允许使用WiFi通讯模块辅助车型操作的竞赛规则进行补充说明。目的是让参赛团队在车路协同、“边缘云计算”等空间有更广阔的探索,引导学生熟悉国产嵌入式操作系统RT-Thread并构建应用体验,奠定基础用于构建复杂的无人系统。本文内容为建议稿件,正式文件将在大赛网站上发布。
关键词:智能汽车竞赛、智能视觉、平衡信标、RT Thread
§01 新规则简要说明 1.1 新规则的目的
本文主要讲解如何在第十七届全国大学生智能汽车大赛智能视觉和平衡信标组中添加一些基于RT-Thread RTOS操作系统的组件应用和WiFi通信模块。一方面,让学生探索更多的手段,方便地完成既定任务;另一方面,车路协同、“边云协同”等概念也融入到智能汽车竞赛中;鼓励参赛同学了解国产嵌入式操作系统RT-Thread RTOS的技术原理和技术原理,并应用实践进行进一步探索。
本着“不影响原有规则细节、不影响原有竞赛形式、允许探索新解决方案”的原则,将在原有规则的基础上进行补充。主要包括两个方面:
1.2 防止通讯作弊
由于无线通讯的加入,为了防止:
以下规则中,现场WiFi热点和ESP8266模块将由比赛主办方提供,ESP8266模块接口和通信协议将统一公布。
1.3 网络服务IP及端口
比赛期间,比赛现场的WiFi局域网将包括:
1.3.1 无线局域网
比赛车型通过专用的ESP8266通信模块连接到现场WiFi局域网。局域网的识别名和密码将在比赛现场提供给参赛队伍;
1.3.2 服务器IP地址和端口
智能视觉组服务器由组委会提供,其对应的IP地址和端口号为:
智能视觉组服务器:
IP地址:192.168.0.222
端口号:2022
平衡信标组的服务器是由参赛队伍在自己的笔记本电脑上编写的。原则上可以自行设置服务器对应的IP地址和端口号。建议使用以下统一IP地址和端口号:
平衡信标组服务器:
IP地址:192.168.0.111
端口号:1011
§02 智能视觉组
下面给出智能视觉组的实施方案和规则补充。
2.1 赛场布局及比赛流程 2.1.1 智视集团赛场
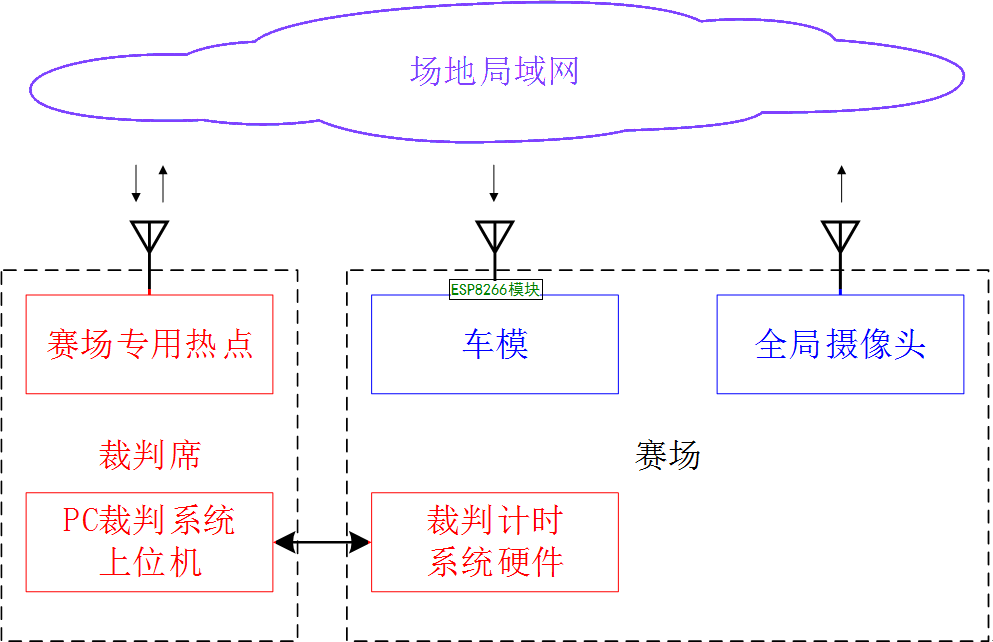
新增WiFi LAN组网通信数据,基于RT-Thread组网组件框架,体育场结构如下图:
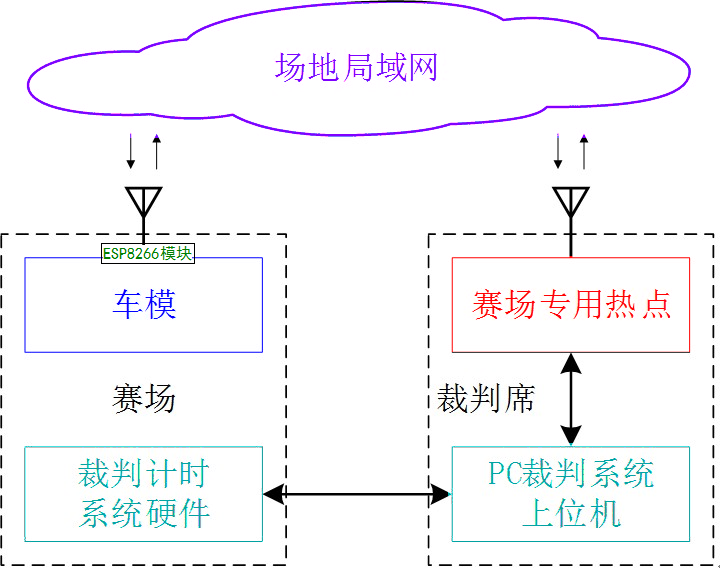
▲ 图2.1.1 竞赛场地组成示意图
上图中,车模由参赛队伍自行制作,其他零部件由大赛组委会现场提供。
根据第十七届智能汽车大赛智能视觉组竞赛规则,参赛车型作品需具备无线模块接口。根据目前的扩容规划,在原有单向发送接口的基础上(该接口有三个端口:VCC、GND、TX),额外增加一个数据接收(RX)端口,形成全双工无线通讯端口。汽车模型可以通过此端口发送和接收信息。
通信模块基于ESP8266,比赛期间由大赛组委会现场提供。
2.1.2 竞赛与交流流程
根据智能视觉组公布的规则,参赛车型可以在赛前通过机器视觉获取场馆内目标物体的位置信息。还可以借助通信模块直接接收现场目标物体的位置信息。
根据基于局域网的新型通信方式,
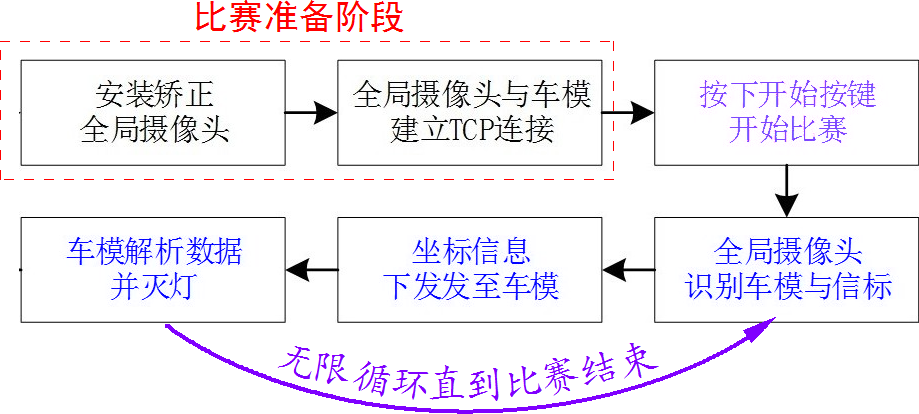
如果采用新的基于LAN的通信方式,按下启动按钮后,车模软件使用RT-Thread RTOS提供联网功能,并使用通信硬件模块与裁判上位机建立TCP连接,然后上位机将数据从局域网发送到车模,车模通过解析裁判系统下发的目标坐标信息,可以直接获得场上所有目标的准确坐标。具体数据标准请参见下文“通信数据格式”。
在车模运行过程中,车模可以通过局域网直接上传自己的坐标和识别信息。不需要使用原来规则规定的发送接口,可以按照规定的数据格式上传自己的坐标和识别的目标信息。
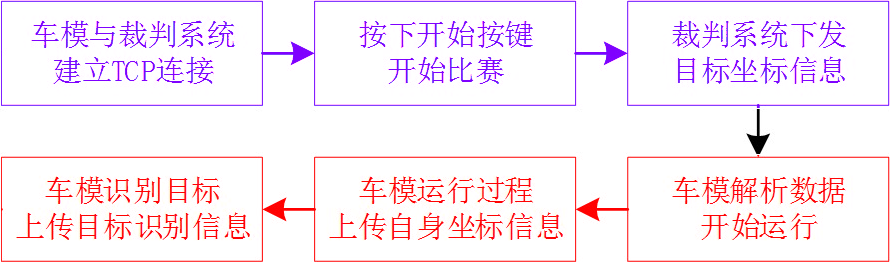
▲ 图2.1.2 比赛流程示意图
比赛期间,组委会将提供专用的ESP8266模块用于局域网接入。
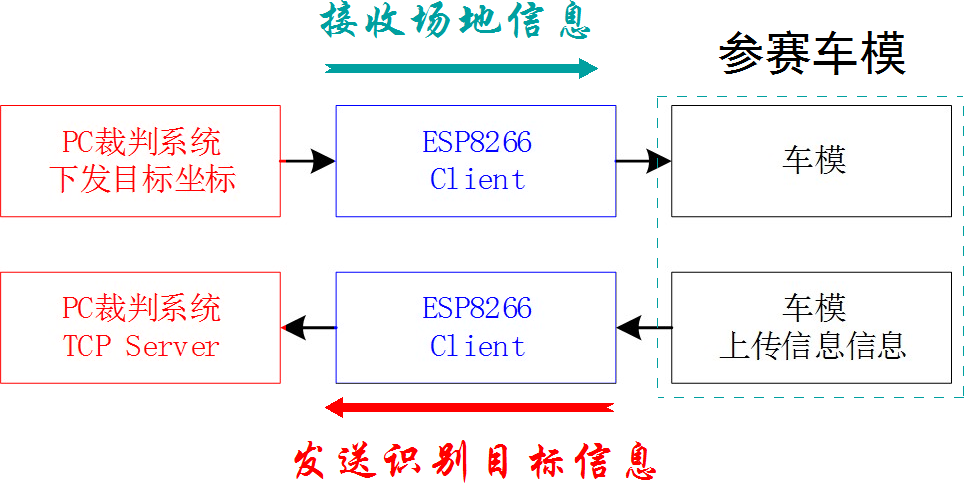
▲ 图2.1.4 参赛车型接收、发送信息示意图 2.2 通讯数据格式 2.2.1 数据格式
如果参赛车型仍使用已公布的视觉组比赛标准,则只能使用通信模块按照之前公布的数据标准发送车型识别目标信息和运行时间信息。如果您打算通过模块直接接收场地信息并发送位置信息,您可以
通信的数据格式采用常见的IOT标准数据格式(JSON格式)进行上传和发送。
(1)车型接收目标位置信息
裁判系统发送给赛车模型的目标信息如下代码所示。
一帧目标坐标信息包含两部分:
{
"Origin": "Server",
"Coordinate": [{
"x": 1,
"y": 3
}, {
"x": 2,
"y": 5
}, {
"x": 6,
"y": 7
}]
}
(2)车辆模型发送位置和目标识别信息Ⅰ.车型位置信息
车模发送给裁判系统的识别信息,以及自身的一帧坐标信息包含两部分:
{
"Origin": "Car",
"Coordinate": [{
"x": 0,
"y": 0
}]
}
为防止参赛车型利用通信模块的下行数据(服务器发送给车型的数据)发送额外的控制命令等生产、扫描信息,组委会提供的通信模块将分析通讯数据。如果发生异常,就会被拦截。
坐标数据内容包括“x”标识比赛场地7米边对应的二维横轴坐标,“y”标识比赛场地5米边对应的二维纵轴坐标,横轴坐标值范围为[0-35],纵轴坐标值范围为[0-25]。如果数据超出限定值范围,该数据将被视为异常数据,并会被场馆下发的ESP8266模块截断。
二、目标识别信息
一帧目标识别信息包含三部分:
{
"Origin": "Car",
"Class": "Animal",
"Subclass": "Cat"
}
2.3 通讯模块接口
兼容现有规则,可以通过指定接口连接官方发布的无线模块,并按照现有数据格式上传数据。详细信息请参见: 。
2.3.1 通讯接口定义
为了兼容原有的规则接口,新扩展的比赛通讯模块增加了下行数据线。计划使用RT-Thread的队伍可以使用该接口与赛事官方提供的ESP8266模块进行通信,并发送和接收JSON格式的数据。
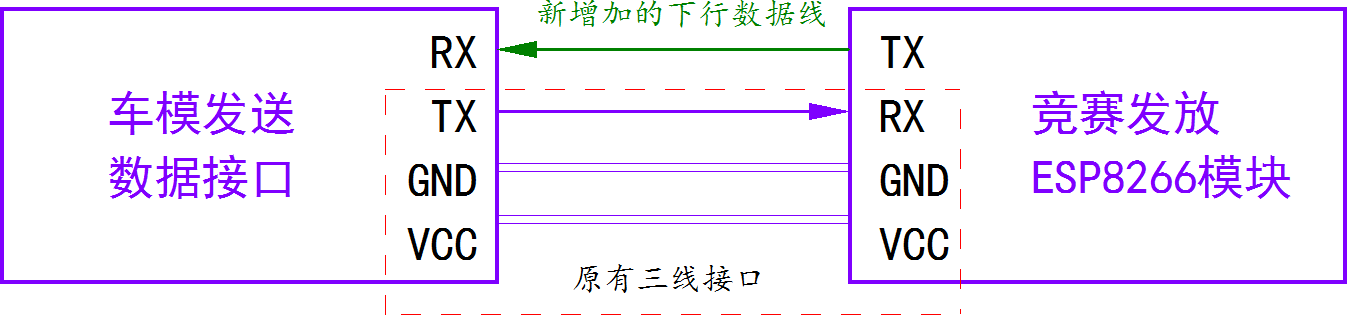
▲ 图2.3.1 新修改的数据界面
通信接口的物理定义由原来的3芯连接器改为4芯。
2.3.2 通讯信息
如果采用RT-Thread局域网接入方式获取目标坐标信息,则在完成与裁判系统主机的TCP连接后,主机将通过局域网下发指定格式的准确目标坐标信息。
如果不使用局域网获取目标坐标信息,仍然可以使用摄像头按照原有规则识别A4纸上的图像,获取目标坐标信息。
§03 平衡信标组
下面给出平衡信标组的实施方案和规则补充。
3.1 赛场布局及比赛流程
比赛场地布局不影响采用传统灯塔竞赛技术方案的车型完成比赛。新规则仅在场馆内增加专用WiFi热点,并允许参赛队伍在场馆外设置全局摄像头,检测场馆内车型和信标的位置。
3.1.1 灯塔组比赛场地构成
参赛队伍可以在赛场边缘添加摄像头,识别车模和信标灯的位置,并通过赛场旁边的WiFi无线局域网发送给正在奔跑的车模,帮助车模完成比赛。关闭信标灯的过程。
▲ 图3.1 航标灯竞赛场地组成示意图
比赛场馆外的全局摄像机、安装支架以及用于处理摄像机图像的笔记本电脑均由参赛队伍自行准备,并在比赛期间搭建、调试和连接。
比赛中使用的ESP8266模块将由比赛组委会提供。该模块对传输数据(JSON格式)进行过滤,只允许传输符合要求的位置信息。
3.1.2 竞赛及交流流程(1)建立可视化服务器
比赛过程中,参赛队伍自带笔记本电脑连接至比赛场馆专用热点星空体育官方网站,并提供TCP通信服务。具体通信协议请参见下面给出的“数据通信协议”。
全局摄像头服务器可由参赛队伍通过编程实现星空体育app官方下载,也可通过指定接口连接到场馆发放的ESP8266模块,即可正常使用。数据格式以指定的JSON格式发送。如果需要将模块设置为 TCP Server,可以使用 RT-Thread 的 ESP8266 驱动组件配合 SAL 套接字抽象层,实现更方便。
(2) 连接服务器的车型
比赛现场提供专用的ESP8266模块,供车型接入现场WiFi并接收数据。
车模部分使用比赛场馆发放的ESP8266模块,可以正常使用。使用ESP8266与全局摄像头的TCP Server建立TCP连接,从而可以与全局摄像头部分进行数据通信。全局摄像头部分发送数据,汽车模型获取并解析数据。
▲ 图3.1.2 比赛流程示意图 3.2 数据格式
通信的数据格式采用常用的IOT标准数据格式(JSON格式)进行分发:
{
"Origin": "Camera",
"Light": [{
"x": 31,
"y": 47
}],
"Car": [{
"x": 23,
"y": 29
}]
}
如上面代码所示,发送一帧数据包含三部分:
坐标数据内容包括“x”标识比赛场地7米边对应的二维横轴坐标,“y”标识比赛场地5米边对应的二维纵轴坐标,横轴坐标值范围为[0-140],纵轴坐标值范围为[0-100],对应的最大坐标精度为5cm。如果数据超出限定值范围星空·综合体育官网入口,该数据将被视为异常数据,并会被场馆下发的ESP8266模块截断。
※ 总结※
本文对智能视觉组和平衡信标组允许使用WiFi通讯模块辅助车型操作的竞赛规则进行补充说明。目的是让参赛团队在车路协同、“边缘云计算”等空间有更广阔的探索,引导学生熟悉国产嵌入式操作系统RT-Thread并构建应用体验,奠定基础用于构建复杂的无人系统。
本文内容为建议稿件,正式文件将在大赛网站上发布。
■ 相关文献链接:
● 相关图表链接:
 鲁ICP备18019460号-4
鲁ICP备18019460号-4
我要评论