星空·体育中国官方网 智能车入门——车模器件篇 <新手从零做车>
本文讲的是骑车需要哪些部件及其用途
目录
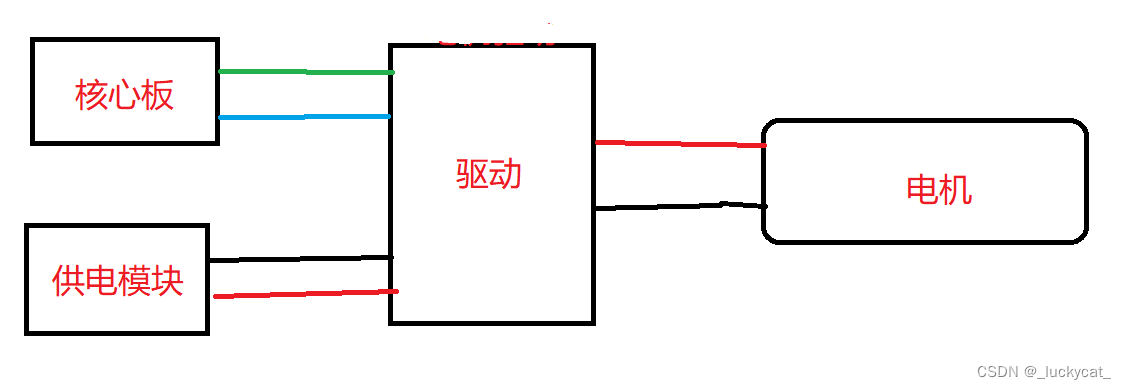
电磁车接线图简单
这是朱飞tb店展示的电磁车简单接线图。加上转向装置,基本上就可以组装出一辆四轮车辆了。
发动机

发动机
你应该熟悉电机
当在电机上施加电压时,电机就会旋转。电压越大,旋转速度越快。
按照电压越大速度越快的说法,结合之前的知识星空体育官方网站,我们可以想到用PWM来控制速度。
但直接将电机连接到核心板的IO口是不可行的(因为IO口电压比较低,损坏的电机可能会导致核心板损坏)
因此需要电机驱动
这篇文章写得很详细,值得一读。
【嵌入式&单片机】一文带你了解电机驱动模块_Mr.云朵_的博客-CSDN博客_电机驱动模块
简单来说,驱动器接线一般是这样的,
电机驱动器有两种常见类型:
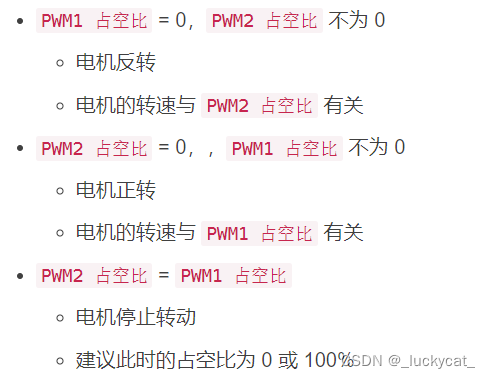
一种是两路PWM
另一个是一个 PWM 和一个 GPIO。
两路PWM根据两路PWM信号的正负差来决定电机旋转方向,差值决定电机转速。
一般采用这种控制方式。图片来自上面的推文。
1个PWM、1个GPIO,即PWM控制速度,GPIO控制方向。
舵机
舵机是伺服电机的一种。
对于普通电机来说,如果我们给出固定的PWM信号,电机齿轮就会以一定的速度旋转。
给予舵机的PWM信号是固定的星空体育平台官网入口,舵机齿轮固定在一个位置,所以伺服电机被称为带有反馈环节的电机。
舵机基本原理及控制方法详解_麦叔的博客-CSDN博客_舵机工作原理及控制方法
舵机有三根线,VCC、GND、PWM信号引脚。接线时,VCC和GND连接到电源模块,PWM大小决定舵机的旋转位置。
建议在安装舵机之前,先给出pwm,然后再安装舵机,这样就可以知道舵机中位值的大致范围。
如果舵机已安装,建议使用试触法。给PWM的时候,如果舵机被杀了,立即拔掉线,然后调整PWM值,重新测量舵机的中值。
电机和伺服频率选择
电磁信号检测|我们同根生,何必相抢?_卓庆博客-CSDN博客_信号检测

伺服控制的PWM频率一般选择50-60HZ,电机控制的PWM频率设置为13-19khz,以尽可能消除干扰。
编码器
智能汽车入门 - Encoder-CSDN博客
编码器齿轮与后轮齿轮啮合,
将编码器读取功能放入程序定时器中断中,我将中断周期设置为5ms。
如果想知道编码器读数与实际车速的关系,可以根据中断时间、编码器档位、电机档位、后轮半径等参数计算出来。
您也可以将汽车沿直线推一米。程序中编码器读数从0开始累加,多次测量,取平均值(假设为L)
那么可以计算出,编码器每增加1,小车实际行驶了1/L米,
中断中每次读取的编码器增量(假设为E)
则车速=E*(1/L)/5米/毫秒
然后处理单位制关系即可得到车速。
电磁感应模块
跟踪采用电磁感应模块。该模块主要通过电感和电容谐振感应磁场信号。

工字形电感
I型电感由一圈线圈组成。
电磁轨道上铺设电磁线,信号发生器发射正弦电流信号,与电感器(线圈)产生电磁感应。电感中会产生电流,但是这个电流比较小,需要运放放大信号供单片机进行AD采集。端口获取轨迹信息。
运算放大器模块的主要作用是对电磁感应模块输出的信号进行放大、整流、滤波,以方便单片机检测。
我们使用的电磁信号发生器发出20KHZ的信号,需要电容和电感组成LC振荡电路。
电感9.3mH和校正电容6.8nF组成LC谐振电路,频率为20KHz。选频效果非常好!
学习做智能车-电磁探索_不合格工程师的博客-CSDN博客_电磁智能车
智能汽车介绍-电磁跟踪原理及实现_智能汽车电磁跟踪元件判断__lucky_R的博客-CSDN博客
陀螺仪
稍后我会谈论陀螺仪。
逐次飞行例程可以获得XYZ轴的角速度和角加速度,
将角速度累加并乘以系数即可获得角度。
陀螺仪主要用于汽车转向控制,也可作为坡度检测等辅助。
智能汽车介绍-陀螺仪
磁铁检测
磁铁检测一般采用干簧管或霍尔检测板。
簧片开关靠近磁铁,两个贴片相连,单簧管的高低电平发生变化。
霍尔检测板的核心是霍尔检测芯片,它是一个特殊的三极管。当磁场强度达到一定值时,霍尔检测板的高低电平发生变化。
两者都是利用单片机读取高低电平来判断磁铁,与按钮的原理类似。
相机
智能汽车简介——摄像头和CCD
智能汽车图像处理逆透视教程_智能车载摄像头逆透视轨迹元素识别-CSDN博客
智能汽车图像处理去畸变+逆透视教程_图像处理逆透视变换-CSDN博客
菜单
智能车模块详解——数据存储与读写(eeprom/flash
智能车模块详解-按键及按键参数调节
系列文章目录
文章分为三个层次
速通版
我希望通过简化的步骤搭建一个追踪小车,然后了解整个智能车是如何实现的,快速上手,为后续参加智能车比赛打下基础。
如果你只是想完成学校智能车的初步训练,制作一辆可以简单跟随赛道的车,可以看看这款速跑版。
完整指南
它讲述了制造一辆能够完成比赛的智能汽车的整个过程。大多数文章只是简单参考,但附有相关文章的链接,方便根据自己的情况深入理解。
完整指南可以让您更系统地了解整个智能汽车生产流程。建议在备战初期或者有了车模之后再学习。
详细解释
它是完整指南的补充。由于完整指南本质上是指导性的,文章内容只是指导性的星空综合体育app下载,缺乏相应的原理或者代码解释,所以写了详细的解释作为补充。
详细的解释将纳入整个指南。
速通版
智能车速通版-分步教程
完整指南
智能车速通版-教程指南(原版)
智能车速通版-教程指南
智能汽车入门——IDE安装及库函数选择
智能汽车入门-编程语言学习(三)
智能汽车入门——常用模块简单驱动
智能汽车简介-车模组件
智能汽车入门——模块化编程
智能汽车入门——跑车之前的碎片知识
智能汽车入门-电磁跟踪原理与实现
智能小车入门——实现低速完成
详细解释
智能汽车入门补充章节
智能汽车入门补充篇——筑飞开源库介绍
智能汽车入门补充-常用宏的定义和使用
智能汽车补充介绍——模块化编程
智能车介绍补充-电感值处理、转向控制和巡线
智能汽车入门补充章节-元素识别
智能车模块详解-按键及按键参数调节
智能车模块详解——数据存储与读写(eeprom/flash)
智能汽车简介-I/O、PWM
智能汽车入门 - 中断
智能小车简介-编码器
智能汽车介绍-陀螺仪
智能汽车简介——摄像头和CCD
智能汽车简介-舵机
(更新中)
 鲁ICP备18019460号-4
鲁ICP备18019460号-4
我要评论