星空·体育中国官方网 如何读取速度编码器? - 哔哩哔哩
一、前言
先前,借助实例代码,我们掌握了在 MicroPython 中借助 LQ Module 提供的 Encode AB 软件模块来获取电机转速编码器的读数,现在星空综合体育app下载,为了更深入地运用编码器,让我们从其基础物理信号层面来探究编码器运作的机制。因此,在汽车模型调试环节,有助于迅速找出问题,有助于更有效地设计控制系统,有助于更合理地挑选控制参数。
二、编码盘
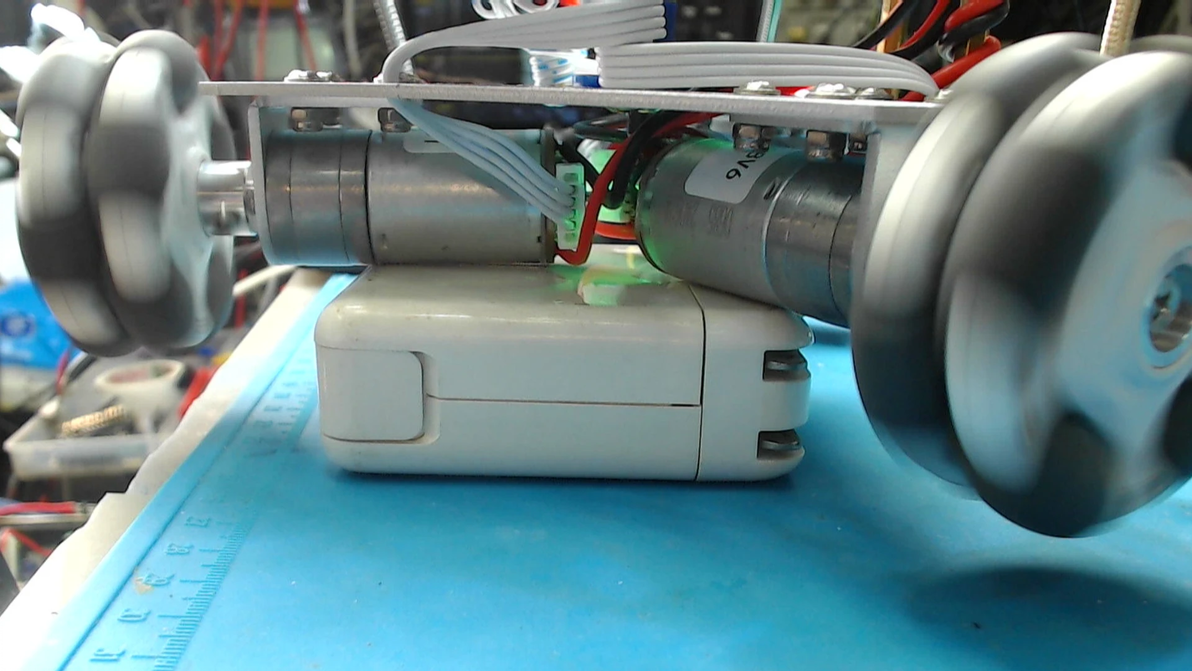
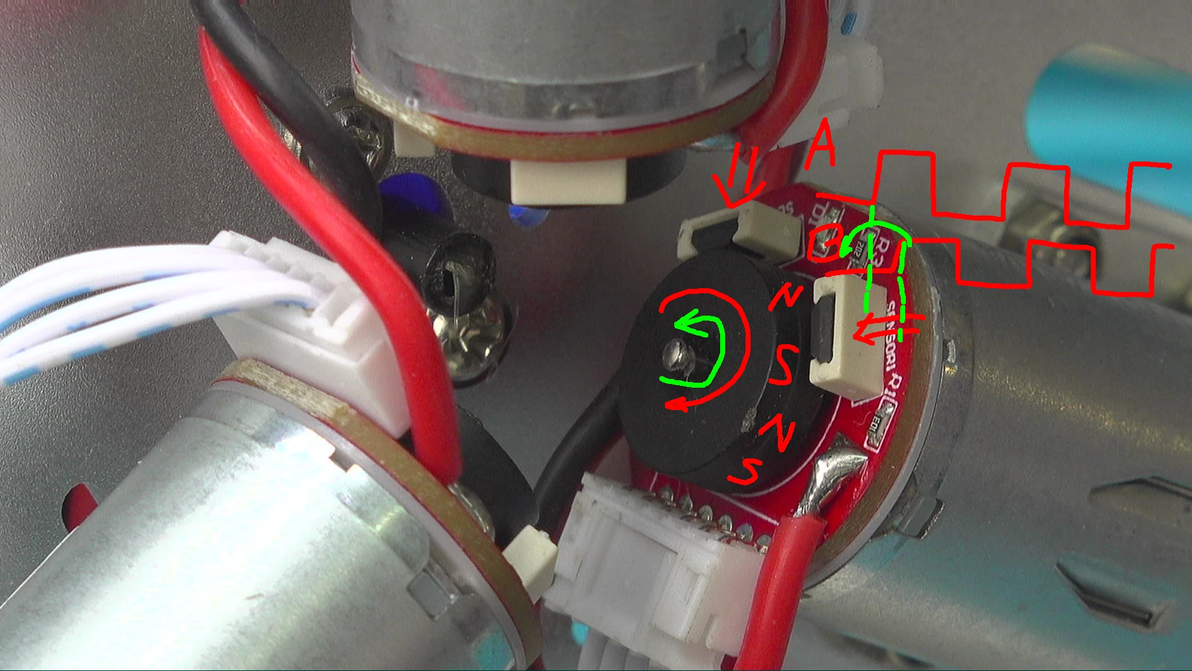
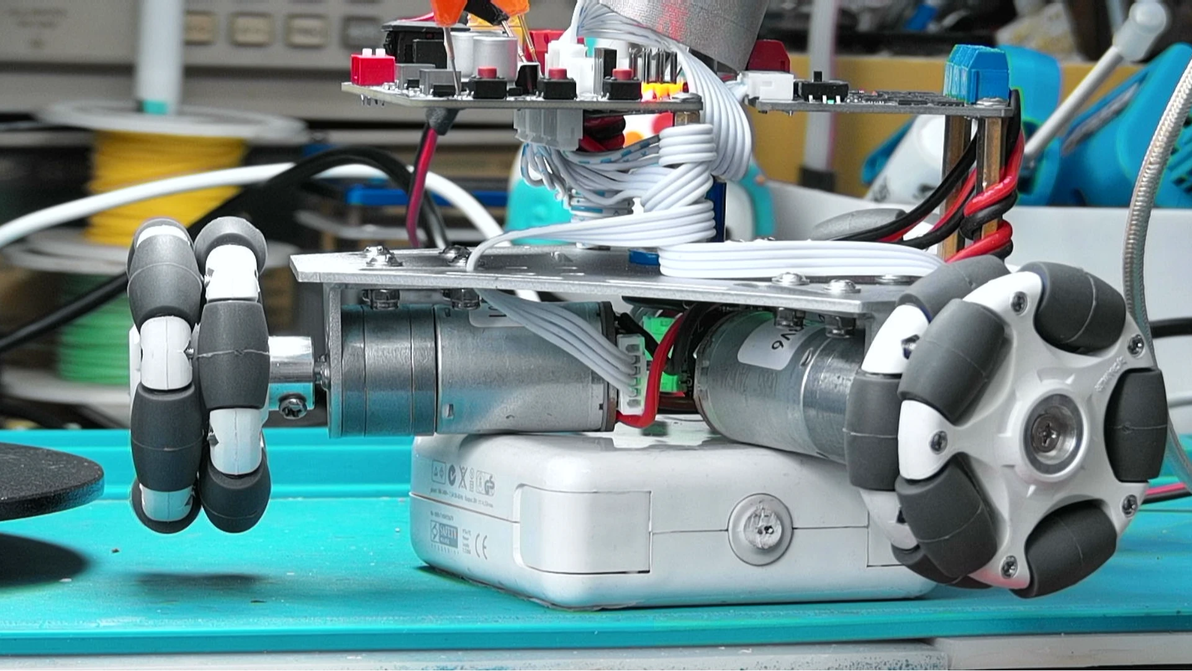
电机尾部安装有速度传感器,将车辆模型颠倒过来,可以看见这些传感器。每个马达上的传感器都是一致的。中间的黑色圆柱形部件是磁铁,它随着电机转子一起转动。需要留意的是,由于电机前方配有变速齿轮组,因此电机转速低于车轮转速。该磁铁的磁极排列较为独特,其外层表面均匀分布着 N、S 磁极,交替出现。具体有多少对磁极,目前还不清楚。必须借助实际测量才能确定。圆形磁铁的两侧各安装了一个霍尔传感器,它们能将旋转磁铁引起的磁场波动转变为开关型电信号。信号出现的快慢与电机的运行速度直接相关。而且,两个霍尔传感器在空间上的摆放位置不一样。因此,它们产生的脉冲信号在时间上不会同步。例如,在磁铁当前旋转方向时,B路信号可能滞后于A路信号。当磁铁旋转方向相反时,B路信号则会领先A路信号。单片机可以通过分析两个信号的相位差来判断电机的旋转方向。现在我们借助示波器来观察这两路信号的情况。
三、编码盘波形
参照资料中的电路图,能够识别出三个编码盘的连接端口,这些端口虽然都是五线扁平插头,实际上仅利用了其中四条线缆。其中包含为编码器提供能量的电源线与地线,以及两条输出霍尔感应脉冲信号的单片机引脚。这三组引脚分别与单片机六个外部输入输出端口相连,当这些引脚上的信号形态发生改变时,将触发单片机内部中断处理并执行脉冲累加操作。下面使用示波器观察一个编码器两个输入脉冲信号。
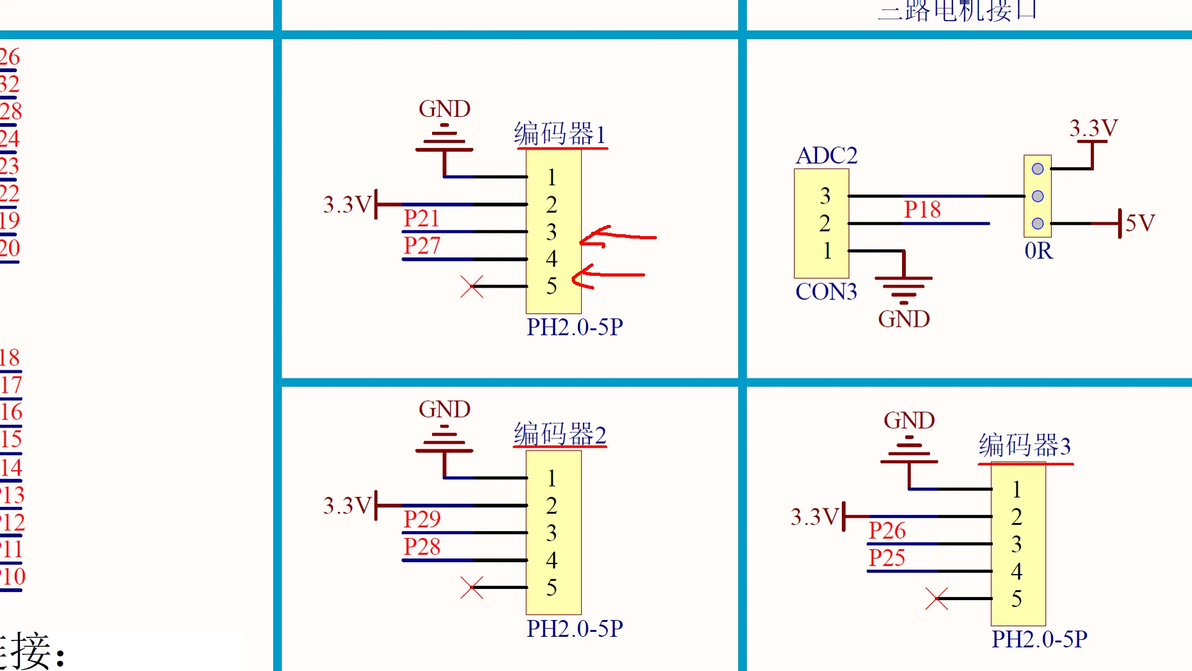
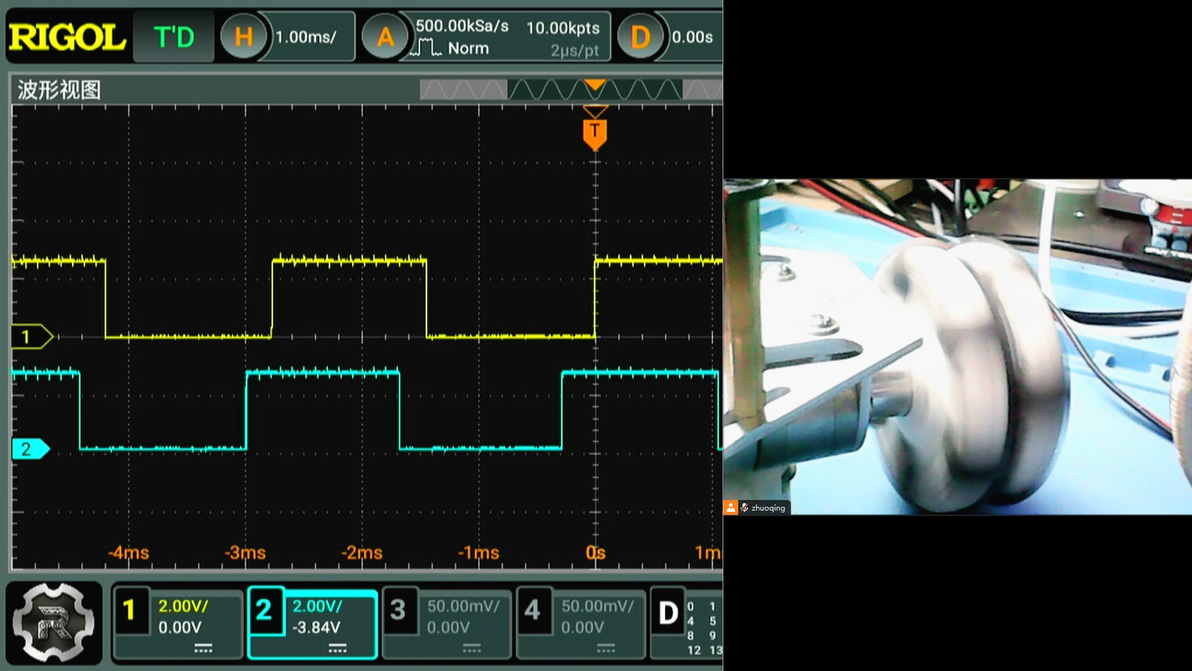
运行先前编写的测试程序,驱动三个轮子进行旋转。把示波器的两个探针分别接到第二个编码器的两条信号线上。这两条线对应单片机的 P28 和 P29 接口。检测到这两条线路上的信号。发现它们都是相同频率的方波脉冲形态。A 路信号在相位上领先 B 路信号。它们之间的相位偏差并非九十度。大约在六十度附近。
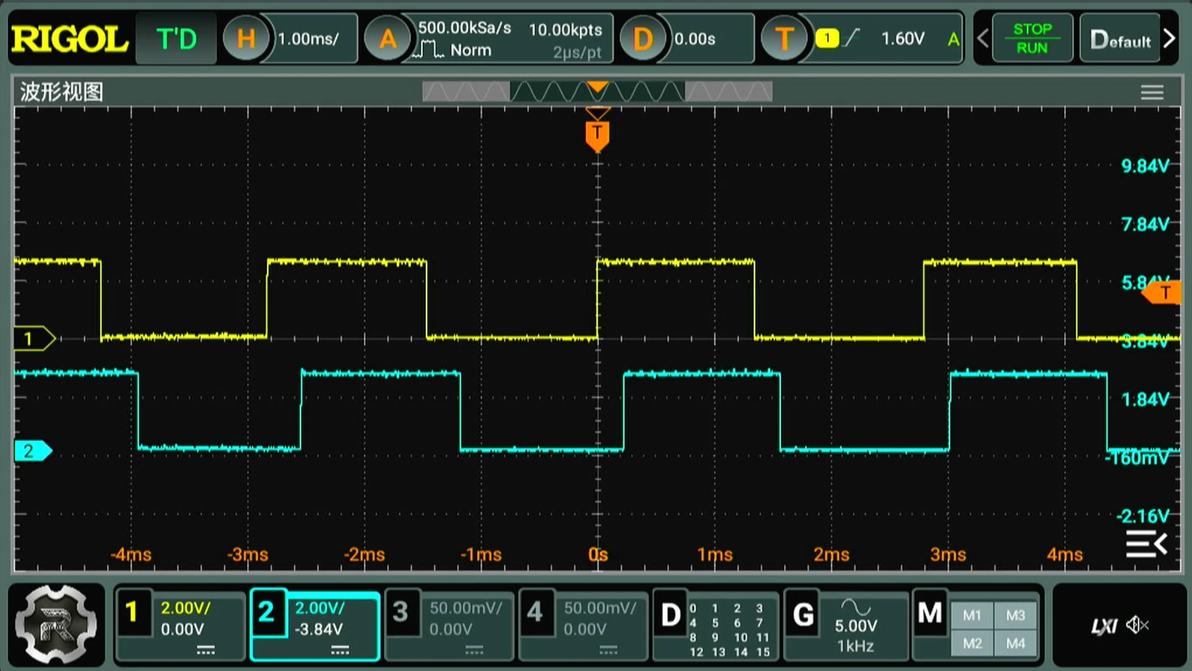
调整软件周期能够使电机旋转方向改变,同时发现两条霍尔信号之间的相对位置也随之变动。蓝色信号的波峰有时出现在黄色信号之后,有时则出现在其之前。利用软件检测单位时间内的脉冲次数,能够推算出电机的运行速度。此外,分析两条信号的相对位置,可以判断出电机的旋转方向。一般情况下,电机转向取决于驱动信号电压的极性,所以多数时候星空体育平台官网入口,测量两个信号频率就足够了。
四、软件工作原理
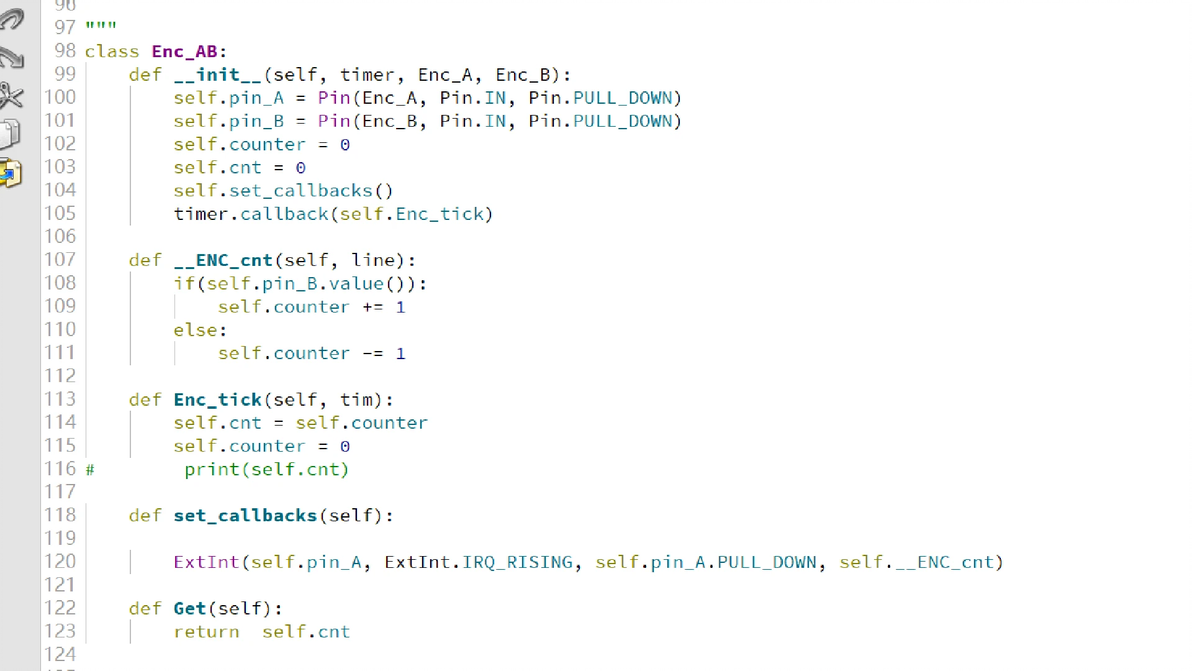
现在来讲解一下 MicroPython 对外部信号频率的检测方法,对于 Python中软件类概念不熟悉的可以跳过这部分,在软件类初始化过程中,timer 创建了一个定时设备,通过为其设置回调操作,能够定时获取脉冲数量这个定时器中断周期一般设置为 0.1 秒,脉冲计数会记录在内部成员变量 count 里,接着清零,以便下一个 0.1 秒的计数,所以读取到的编码器速度数值,反映的是上一个 0.1 秒内的脉冲数量,这个数量与转速编码器的转动速率成正比关系。
另外要设置两个输入端口,用来获取编码器两个霍尔传感器的信号情况。值得注意的是,只用其中一条信号线就能让 IO 口触发中断。借助单片机的 IO 口中断功能,可以统计脉冲的次数。具体来说,选用第一条信号线,当它出现上升沿时就会触发中断,而中断处理程序是 Encoder Count 函数。在响应信号时,检测另一组霍尔电平状态,从而确定该组信号相位是领先还是滞后,随后对脉冲计数进行递增或递减操作。通过这种方式,计数数值的正负能够指示外部编码器的旋转方向。合理设定脉冲计数周期时长,例如设定为0.1秒,可以在速度测量和精度要求之间取得平衡。
※ 总 结 ※
本文阐述了三轮车电机速度传感器的运作机制。依据传感器输出脉冲的快慢,能够掌握电机的运行速度。参照传感器两条输出信号的先后顺序,能够明确电机的转动方向。相关的软件功能都在指定的学习范例程序 LQ Module 软件中的 Encoder 类里完成。借助电机传感器恰当运用,有助于实现车模移动的精准操控。
参考资料
清华大学自动化系科技营,以及智能机器人挑战赛,提供了学习方略,网址是:https://blog.csdn.net/zhuoqingjoking97298/article/details/140378536?csdn_share_tail=%7B%22type%22%3A%22blog%22%2C%22rType%22%3A%22article%22%2C%22rId%22%3A%22140378536%22%2C%22source%22%3A%22zhuoqingjoking97298%22%7D
主板实验,怎样获取轮子转动的速度星空·体育中国官方网,相关内容请参考这个链接,地址是:https://zhuoqing.blog.csdn.net/article/details/140590441。
 鲁ICP备18019460号-4
鲁ICP备18019460号-4
我要评论